DigiExcavator
Noopur Kumari Kashyap | Zulqarnain | Sajal Tak

Introduction
CB Simulator is a Virtual reality simulator to help new drivers learn and practice in a virtual environment. This JCB simulator has physical controllers that are similar to those present in a JCB. A virtual environment with some haptic feedback can provide a better experience of real-world scenarios. There are two clear benefits of using this. First, a trainee can receive his/her initial training not directly on the road and under different environmental conditions. Second, the training cost and the risks involved during training can be highly reduced.
How it works
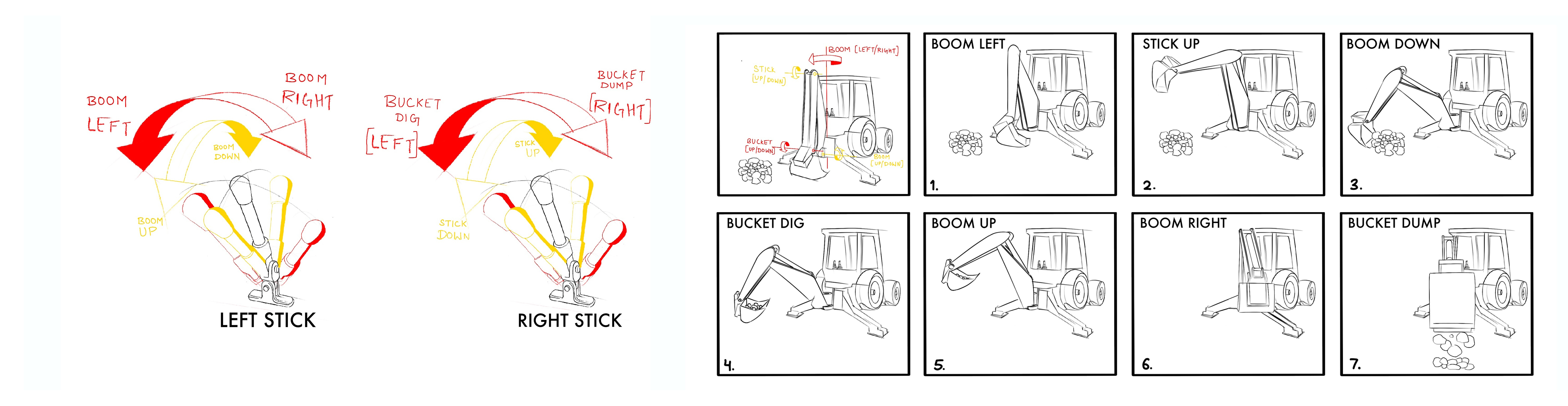
The following controller guide shows the list of interactions and shows how to interact with controllers to achieve a specific action. It also shows the function of each controller (Right and Left) and its movement.
Testing

Final Outcome
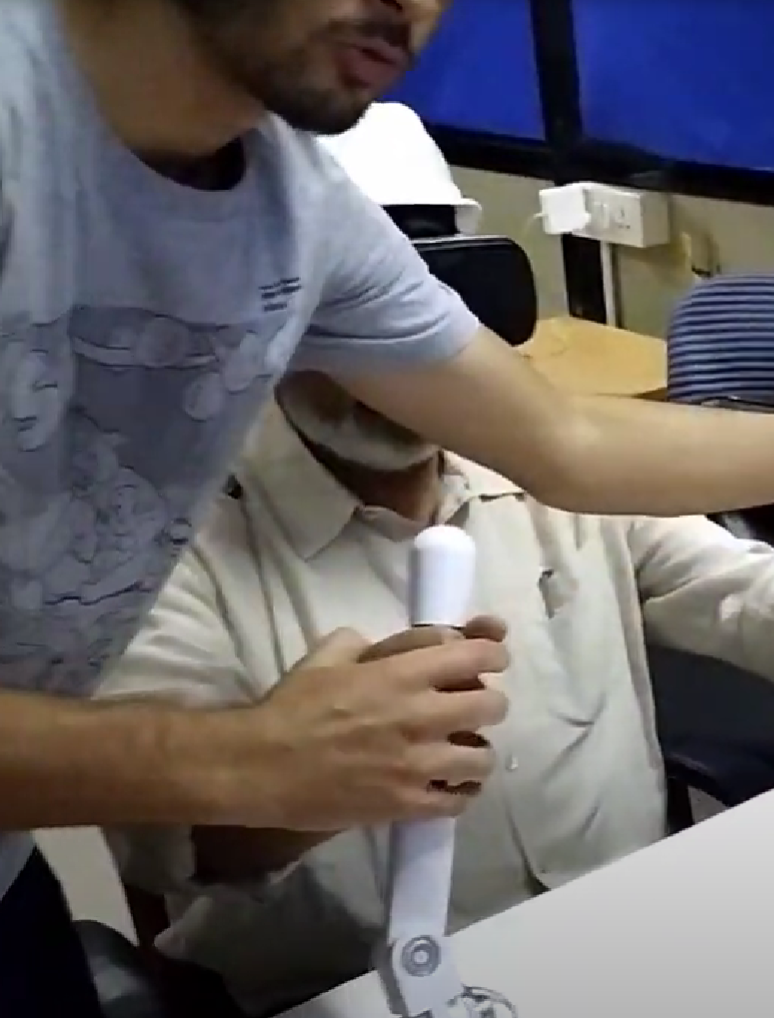
The video shows testing of DigiExcavator by various users. Users of various types explored and tested the prototype. As seen in the video, the controllers were assembled with arduino circuit. Also, the input from controller is mapped to the code in unity to operate virtual JCB.